728x90
반응형
안녕하세요 땜블리 입니다.
라즈베리파이 피코 베이직 트레이닝 보드를 이용한 블루투스 / SD CARD제어를 진행 하겠습니다.
베이직 트레이닝 보드는 아래에서 확인이 가능합니다.
라즈베리파이 피코 베이직 트레이닝보드 구성
라즈베리파이 피코 보드의 펌웨어실습을 위한 베이직 트레이닝보드를 소개 합니다. 현재 네이버 스마트스토어에서 판매가 진행되고 있습니다. 라즈베리파이 피코 베이직 트레이닝 보드 라즈베
ttcw.tistory.com

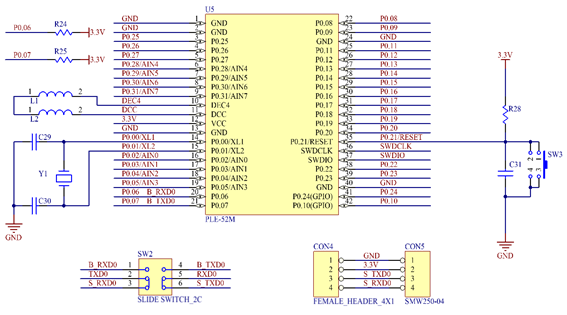
- 온습도 데이터를 블루투스를 통하여 전송하고 SD CARD에 데이터 저장 하기
main.py
from machine import UART, Pin, I2C, ADC, PWM,SPI
from time import sleep
import dht
import sdcard
import uos
led1 = Pin(2,Pin.OUT)
led2 = Pin(3,Pin.OUT)
CdS_adc = ADC(Pin(27))
vr_adc = ADC(Pin(26))
dhtIn = Pin(7,Pin.IN) # 온/습도 센서 설정
dhtOut = dht.DHT11(dhtIn)# 온/습도 센서 설정
uart0 = UART(0, baudrate=115200, bits=8, parity=None, stop=1, tx=Pin(16), rx=Pin(17))# UART 설정
uart0.write("pico sensorBoard Test\n")
CS = Pin(9, Pin.OUT)
spi = machine.SPI(1,baudrate=1000000,polarity=0,phase=0,bits=8,firstbit=SPI.MSB,sck=Pin(10),mosi=Pin(11),miso=Pin(8))
sd = sdcard.SDCard(spi,CS)
vfs = uos.VfsFat(sd)
uos.mount(vfs, '/sd')
print(uos.listdir('/sd'))
temp=0
humi=0
def tempHumiSensor():
global temp, humi
dhtOut.measure()
temp = dhtOut.temperature()
humi = dhtOut.humidity()
sleep(0.5)
VRData=0
def adcInput(ch):
global VRData
if ch == 0: #VR
VRData = vr_adc.read_u16()
VRDataV = (3.3/65535) * VRData
VRDataV = round(VRDataV,1)
return VRDataV
elif ch == 1: #CdS
CdSData = CdS_adc.read_u16()
CdSDataV = (3.3/65535) * CdSData
CdSDataV = round(CdSDataV,1)
return CdSDataV
def sdcardwrite():
led2.value(0)
file = open("/sd/sample1.txt","a")
file.write("Temperature : {:.0f}C Humidity : {:.0f}% VRVolt : {:.2f}V CdSVolt : {:.2f}V \r\n".format(temp, humi, adcInput(0),adcInput(1)))
file.close()
led2.value(1)
while True:
tempHumiSensor()
print('Temperature = {:.1f}C Humidity = {:.1f}%'.format(temp,humi))
print('CdS Volt = {:.1f}V VR Volt = {:.1f}V'.format(adcInput(1),adcInput(0)))
vrInput = adcInput(0)
cdsInput = adcInput(1)
uart0.write("temp : ")
uart0.write(str(temp))
uart0.write('C')
uart0.write(" Humi : ")
uart0.write(str(humi))
uart0.write('%')
uart0.write(" CdSV : ")
uart0.write(str(cdsInput))
uart0.write('V')
uart0.write(" VR_V : ")
uart0.write(str(vrInput))
uart0.write('V')
uart0.write('\n')
sdcardwrite()
sleep(0.5)sdcard.py
from micropython import const
import time
_CMD_TIMEOUT = const(100)
_R1_IDLE_STATE = const(1 << 0)
# R1_ERASE_RESET = const(1 << 1)
_R1_ILLEGAL_COMMAND = const(1 << 2)
# R1_COM_CRC_ERROR = const(1 << 3)
# R1_ERASE_SEQUENCE_ERROR = const(1 << 4)
# R1_ADDRESS_ERROR = const(1 << 5)
# R1_PARAMETER_ERROR = const(1 << 6)
_TOKEN_CMD25 = const(0xFC)
_TOKEN_STOP_TRAN = const(0xFD)
_TOKEN_DATA = const(0xFE)
class SDCard:
def __init__(self, spi, cs, baudrate=1320000):
self.spi = spi
self.cs = cs
self.cmdbuf = bytearray(6)
self.dummybuf = bytearray(512)
self.tokenbuf = bytearray(1)
for i in range(512):
self.dummybuf[i] = 0xFF
self.dummybuf_memoryview = memoryview(self.dummybuf)
# initialise the card
self.init_card(baudrate)
def init_spi(self, baudrate):
try:
master = self.spi.MASTER
except AttributeError:
# on ESP8266
self.spi.init(baudrate=baudrate, phase=0, polarity=0)
else:
# on pyboard
self.spi.init(master, baudrate=baudrate, phase=0, polarity=0)
def init_card(self, baudrate):
# init CS pin
self.cs.init(self.cs.OUT, value=1)
# init SPI bus; use low data rate for initialisation
self.init_spi(100000)
# clock card at least 100 cycles with cs high
for i in range(16):
self.spi.write(b"\xff")
# CMD0: init card; should return _R1_IDLE_STATE (allow 5 attempts)
for _ in range(5):
if self.cmd(0, 0, 0x95) == _R1_IDLE_STATE:
break
else:
raise OSError("no SD card")
# CMD8: determine card version
r = self.cmd(8, 0x01AA, 0x87, 4)
if r == _R1_IDLE_STATE:
self.init_card_v2()
elif r == (_R1_IDLE_STATE | _R1_ILLEGAL_COMMAND):
self.init_card_v1()
else:
raise OSError("couldn't determine SD card version")
# get the number of sectors
# CMD9: response R2 (R1 byte + 16-byte block read)
if self.cmd(9, 0, 0, 0, False) != 0:
raise OSError("no response from SD card")
csd = bytearray(16)
self.readinto(csd)
if csd[0] & 0xC0 == 0x40: # CSD version 2.0
self.sectors = ((csd[8] << 8 | csd[9]) + 1) * 1024
elif csd[0] & 0xC0 == 0x00: # CSD version 1.0 (old, <=2GB)
c_size = csd[6] & 0b11 | csd[7] << 2 | (csd[8] & 0b11000000) << 4
c_size_mult = ((csd[9] & 0b11) << 1) | csd[10] >> 7
self.sectors = (c_size + 1) * (2 ** (c_size_mult + 2))
else:
raise OSError("SD card CSD format not supported")
# print('sectors', self.sectors)
# CMD16: set block length to 512 bytes
if self.cmd(16, 512, 0) != 0:
raise OSError("can't set 512 block size")
# set to high data rate now that it's initialised
self.init_spi(baudrate)
def init_card_v1(self):
for i in range(_CMD_TIMEOUT):
self.cmd(55, 0, 0)
if self.cmd(41, 0, 0) == 0:
self.cdv = 512
# print("[SDCard] v1 card")
return
raise OSError("timeout waiting for v1 card")
def init_card_v2(self):
for i in range(_CMD_TIMEOUT):
time.sleep_ms(50)
self.cmd(58, 0, 0, 4)
self.cmd(55, 0, 0)
if self.cmd(41, 0x40000000, 0) == 0:
self.cmd(58, 0, 0, 4)
self.cdv = 1
# print("[SDCard] v2 card")
return
raise OSError("timeout waiting for v2 card")
def cmd(self, cmd, arg, crc, final=0, release=True, skip1=False):
self.cs(0)
# create and send the command
buf = self.cmdbuf
buf[0] = 0x40 | cmd
buf[1] = arg >> 24
buf[2] = arg >> 16
buf[3] = arg >> 8
buf[4] = arg
buf[5] = crc
self.spi.write(buf)
if skip1:
self.spi.readinto(self.tokenbuf, 0xFF)
# wait for the response (response[7] == 0)
for i in range(_CMD_TIMEOUT):
self.spi.readinto(self.tokenbuf, 0xFF)
response = self.tokenbuf[0]
if not (response & 0x80):
# this could be a big-endian integer that we are getting here
for j in range(final):
self.spi.write(b"\xff")
if release:
self.cs(1)
self.spi.write(b"\xff")
return response
# timeout
self.cs(1)
self.spi.write(b"\xff")
return -1
def readinto(self, buf):
self.cs(0)
# read until start byte (0xff)
for i in range(_CMD_TIMEOUT):
self.spi.readinto(self.tokenbuf, 0xFF)
if self.tokenbuf[0] == _TOKEN_DATA:
break
time.sleep_ms(1)
else:
self.cs(1)
raise OSError("timeout waiting for response")
# read data
mv = self.dummybuf_memoryview
if len(buf) != len(mv):
mv = mv[: len(buf)]
self.spi.write_readinto(mv, buf)
# read checksum
self.spi.write(b"\xff")
self.spi.write(b"\xff")
self.cs(1)
self.spi.write(b"\xff")
def write(self, token, buf):
self.cs(0)
# send: start of block, data, checksum
self.spi.read(1, token)
self.spi.write(buf)
self.spi.write(b"\xff")
self.spi.write(b"\xff")
# check the response
if (self.spi.read(1, 0xFF)[0] & 0x1F) != 0x05:
self.cs(1)
self.spi.write(b"\xff")
return
# wait for write to finish
while self.spi.read(1, 0xFF)[0] == 0:
pass
self.cs(1)
self.spi.write(b"\xff")
def write_token(self, token):
self.cs(0)
self.spi.read(1, token)
self.spi.write(b"\xff")
# wait for write to finish
while self.spi.read(1, 0xFF)[0] == 0x00:
pass
self.cs(1)
self.spi.write(b"\xff")
def readblocks(self, block_num, buf):
nblocks = len(buf) // 512
assert nblocks and not len(buf) % 512, "Buffer length is invalid"
if nblocks == 1:
# CMD17: set read address for single block
if self.cmd(17, block_num * self.cdv, 0, release=False) != 0:
# release the card
self.cs(1)
raise OSError(5) # EIO
# receive the data and release card
self.readinto(buf)
else:
# CMD18: set read address for multiple blocks
if self.cmd(18, block_num * self.cdv, 0, release=False) != 0:
# release the card
self.cs(1)
raise OSError(5) # EIO
offset = 0
mv = memoryview(buf)
while nblocks:
# receive the data and release card
self.readinto(mv[offset : offset + 512])
offset += 512
nblocks -= 1
if self.cmd(12, 0, 0xFF, skip1=True):
raise OSError(5) # EIO
def writeblocks(self, block_num, buf):
nblocks, err = divmod(len(buf), 512)
assert nblocks and not err, "Buffer length is invalid"
if nblocks == 1:
# CMD24: set write address for single block
if self.cmd(24, block_num * self.cdv, 0) != 0:
raise OSError(5) # EIO
# send the data
self.write(_TOKEN_DATA, buf)
else:
# CMD25: set write address for first block
if self.cmd(25, block_num * self.cdv, 0) != 0:
raise OSError(5) # EIO
# send the data
offset = 0
mv = memoryview(buf)
while nblocks:
self.write(_TOKEN_CMD25, mv[offset : offset + 512])
offset += 512
nblocks -= 1
self.write_token(_TOKEN_STOP_TRAN)
def ioctl(self, op, arg):
if op == 4: # get number of blocks
return self.sectors반응형
동작결과

마이크로파이썬 shell 창에서의 출력 데이터


728x90
반응형
'라즈베리파이_피코_피코 W > 마이크로파이썬' 카테고리의 다른 글
| 12. 라즈베리파이 피코 서보모터 (0) | 2023.03.06 |
|---|---|
| 10. 라즈베리파이 피코 OLED제어 (2) | 2023.03.04 |
| 09. 라즈베리파이 피코 DHT11제어 (0) | 2023.03.03 |
| 08. 라즈베리파이 피코 릴레이제어 (0) | 2023.03.02 |
| 07.라즈베리파이 피코 WS2812 (0) | 2023.03.01 |




댓글